한국전자통신연구원(ETRI)이 세계 최고 권위 로봇학술대회에서 최상위권에 올랐다.
ETRI는 ‘ICRA 2025, 필드 로보틱스 워크숍’에서 열린 ‘Goose 2D 의미론적 분할 챌린지(Goose 2D Semantic Segmentation Challenge)’에 참가해 세계 2위를 차지했다.
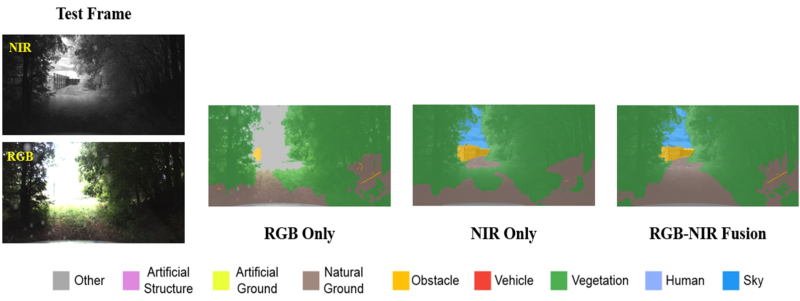
이번 대회는 필드 로봇이 실제 마주하게 되는 들판, 산림, 건설 현장 등 비정형 지형에서 촬영한 2D 영상데이터를 기반으로 수풀, 돌, 나무, 땅 등의 객체를 픽셀 단위로 정확히 구분하는 인공지능(AI) 기술 성능을 겨루는 방식으로 진행됐다.
참가자들은 제한된 학습 데이터를 기반으로 사전 훈련된 모델을 개발, 시맨틱 분할 정확도를 mIoU(mean Intersection over Union) 수치로 객체를 인식하는 성능을 시현했다.
시맨틱 세그멘테이션(Semantic Segmentation)은 이미지에서 픽셀 단위로 ‘무엇이 어디에 있는지’를 구분하는 인공지능 기술로, 나무, 바위, 지면 등의 객체를 각각의 색으로 구분해 표시하고, mIoU는 AI모델이 이미지에서 객체를 얼마나 정확히 분할했는지를 수치로 평가하는 지표다.
ETRI는 대경권연구본부 모빌리티AI융합연구실 안수용 책임연구원과 김원준 석사후연구원이 출전해 복잡한 비정형 야외 환경에서 뛰어난 객체 분할성능으로 높은 성적을 기록했다.
이번 챌린지에서 제공된 데이터셋은 기존 도시기반 시맨틱 세그멘테이션 데이터셋과 달리 산림, 들판, 미개발지 등 높은 난이도를 보였다.
특히 광량 변화, 불규칙 구조물, 시야 방해요소 등 현실적 환경 요소와 객체 간 시각적 유사성으로 로봇기술의 성숙도를 평가했다.

ETRI는 이번 성과를 바탕으로 복잡한 비정형 지형에서 기존 자율주행 기술로 인식 정확도와 주행 안정성을 확보하기 어려운 산림, 농지, 건설현장, 재난지역 등에서 안정적으로 동작할 수 있는 기술을 완성할 계획이다.
변우진 ETRI 대경권연구본부장은 “이번 수상은 우리 연구진의 기술력과 연구 성과가 세계 최고 권위의 로봇 학회에서 국제적으로 공인받았다는 점에서 의미가 크다”며 “영상기반 시맨틱 세그멘테이션 기술은 자율주행, 물류, 산업로봇 등 다양한 모빌리티 애플리케이션에 폭넓게 활용될 수 있을 것”이라고 말했다.