국내 연구진이 인공근육 움직임을 획기적으로 개선할 수 있는 기술을 개발했다.
KAIST는 기계공학과 오일권 교수팀이 협소한 공간에서 초저전력으로도 큰 힘을 내는 소프트 유체 스위치를 개발했다고 4일 밝혔다.
인공근육 개발은 전기 자극, 공기 압력, 온도 변화 등 외부자극에 정교하게 반응토록 제어하고 부드러운 움직임을 구현하는 것이 관건이다.
하지만 기존 모터 기반 스위치는 딱딱하고 큰 부피 때문에 제한된 공간에서 사용하는데 제약이 따른다.
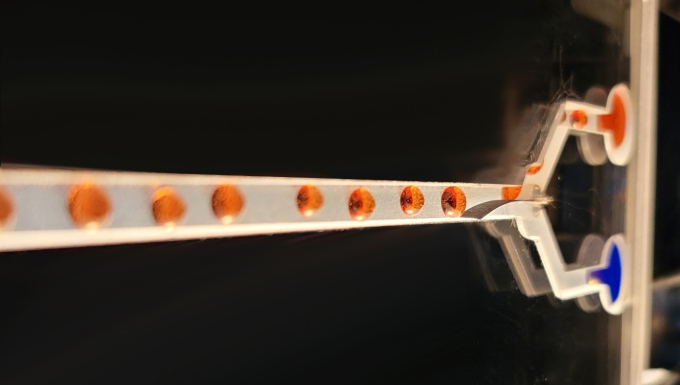
오 교수팀은 좁은 관 속에서 큰 힘을 내며 유체 흐름을 제어할 수 있는 이온성 고분자 인공근육을 개발, 이를 소프트 유체 스위치로 활용했다.
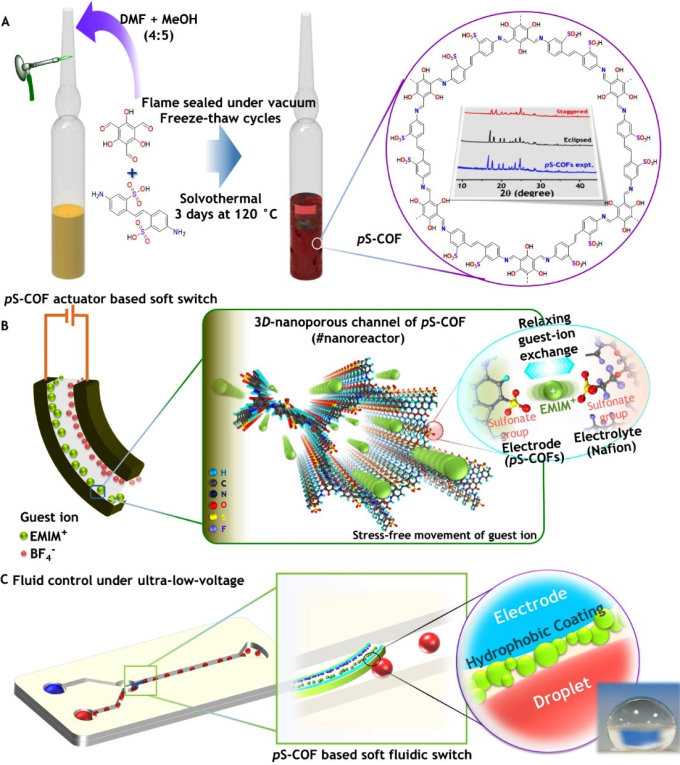
이를 위해 오 교수팀은 다공성의 공유 유기 골격체(pS-COF)라는 새로운 기능성 나노 물질을 합성했다.
이 골격체를 이온성 고분자 인공근육의 전극으로 활용한 결과 머리카락 굵기인 180㎛ 두께, 인공근육 무게 10㎎보다 34배 이상의 큰 힘을 낼 수 있었다.
특히 0.01V 이하 초저전력에서 구동하면서도 유체 흐름을 정교하게 제어해 부드러운 움직임을 구현했다.
이를 활용하면 소프트 로봇, 웨어러블 기기, 혈액 흐름을 제어하는 판막 등 다양한 생활 및 산업현장에 적용할 수 있을 것으로 기대된다.
오 교수는 “이번 연구결과는 유체 제어를 기반으로 하는 소프트 로봇은 물론 스마트섬유에서 생체 의료기기에 이르기까지 적용할 수 있을 것”이라고 설명했다.
대덕특구=이재형 기자 jh@kukinews.com